
👤 Short Bio
Welcome to my academic homepage. I am Jiayi Wu, a 3rd-year Ph.D. student supervised by Prof. Yiannis Aloimonos at PRG (Perception & Robotics Group) Lab, University of Maryland, College Park. My research focuses on 3D vision and robotics, specifically in the areas of 3D/4D Generation, Active Vision, and Field Robotics (especially Underwater Robotics). Inspired by nature, I am dedicated to creating innovative world generator & simulator and robot perception systems that challenge existing paradigms and redefine the future of 3D vision and robotics.
Before that, I worked with Prof. Md Jahidul Islam and completed my Master’s thesis under his supervision.
My research interest includes:
- 3D/4D Generation: Controllable real world generation
- General Environment Vision: Make computer vision systems more robust to the environment (scattering media, bad weather)
- Active Vision: Feedback control through vision
📢 News
-
2025/07/02: Our paper “Single-Step Latent Diffusion for Underwater Image Restoration” has been accepted by TPAMI (will present on ICCP 2025) !!!
-
2025/06/25: Our paper “Learning Normal Flow Directly From Event Neighborhoods” has been accepted by ICCV 2025 !!!
-
2025/06/15: Our paper “ViewActive: Active viewpoint optimization from a single image” has been accepted by IROS 2025 !!!
-
2024/09/04: Our paper “Event3DGS: Event-Based 3D Gaussian Splatting for High-Speed Robot Egomotion” has been accepted by CoRL 2024 !!!
-
2024/06/30: Our paper “MARVIS: Motion & Geometry Aware Real and Virtual Image Segmentation” has been accepted by IROS 2024 !!!
-
2023/12/07: Our paper “Microwave Backscatter Phenomenology of Corn Fields at L-Band Using a Full-Wave Electromagnetic Solver” has been published in the IEEE Transactions on Geoscience and Remote Sensing (IEEE TGRS) !!!
-
2023/06/06: Our paper “3D Reconstruction of Underwater Scenes using Nonlinear Domain Projection” won Best Paper Award at the IEEE Conference on Artificial Intelligence (IEEE CAI) 2023, Santa Clara, California !!!
-
2023/05/01: Our paper “3D Reconstruction of Underwater Scenes using Nonlinear Domain Projection” has been accepted by IEEE Conference on Artificial Intelligence (IEEE CAI) 2023 !!!
-
2023/04/03: Our paper “VALIDATION OF A FULL-WAVE BACKSCATTER MODEL FOR CORN FIELDS USING MEASUREMENTS FROM A GROUND-BASED SCATTEROMETER” has been accepted by IGARSS 2023 !!!
- 2023/01/16: Our paper “UDepth: Fast Monocular Depth Estimation for Visually-guided Underwater Robots” has been accepted by ICRA 2023 !!!
-
2022/08/23: Completed the summer internship at Vobile and got a return offer (recommended by Dr. Zhao).
-
2022/05/23: Joined the team of Dr. Zhao (CTO of Vobile) of Vobile as an audio and video algorithm development engineer (summer internship).
-
2022/01/10: Join Professor Judge’s Remote Sensing Lab (as Graduate Student Assistant) and be responsible for the development of a large-scale automated generation of 3D plant models.
🎓 Educations
University of Maryland, College Park
- Ph.D. in Computer Science ——— Aug. 2023- Present
Supervised by Prof. Yiannis Aloimonos.
University of Florida
- M.S.(Thesis) in Electrical and Computer Engineering ——— Aug. 2021- May. 2023
Supervised by Prof. Md Jahidul Islam.
Zhejiang Sci-Tech University (ZSTU)
- B.E. in Mechatronic Engineering ——— Sept. 2017- Jun. 2021
2021 Outstanding Graduate, Zhejiang Sci-Tech University
📝 Publications
Conference Papers
Jiayi Wu*, Tianfu Wang*, Md Abu Bakr Siddique, Md Jahidul Islam, Cornelia Fermuller, Yiannis Aloimonos, Christopher A. Metzler. Single-Step Latent Diffusion for Underwater Image Restoration. TPAMI & ICCP 2025
[Project Page] [Code] [Poster]
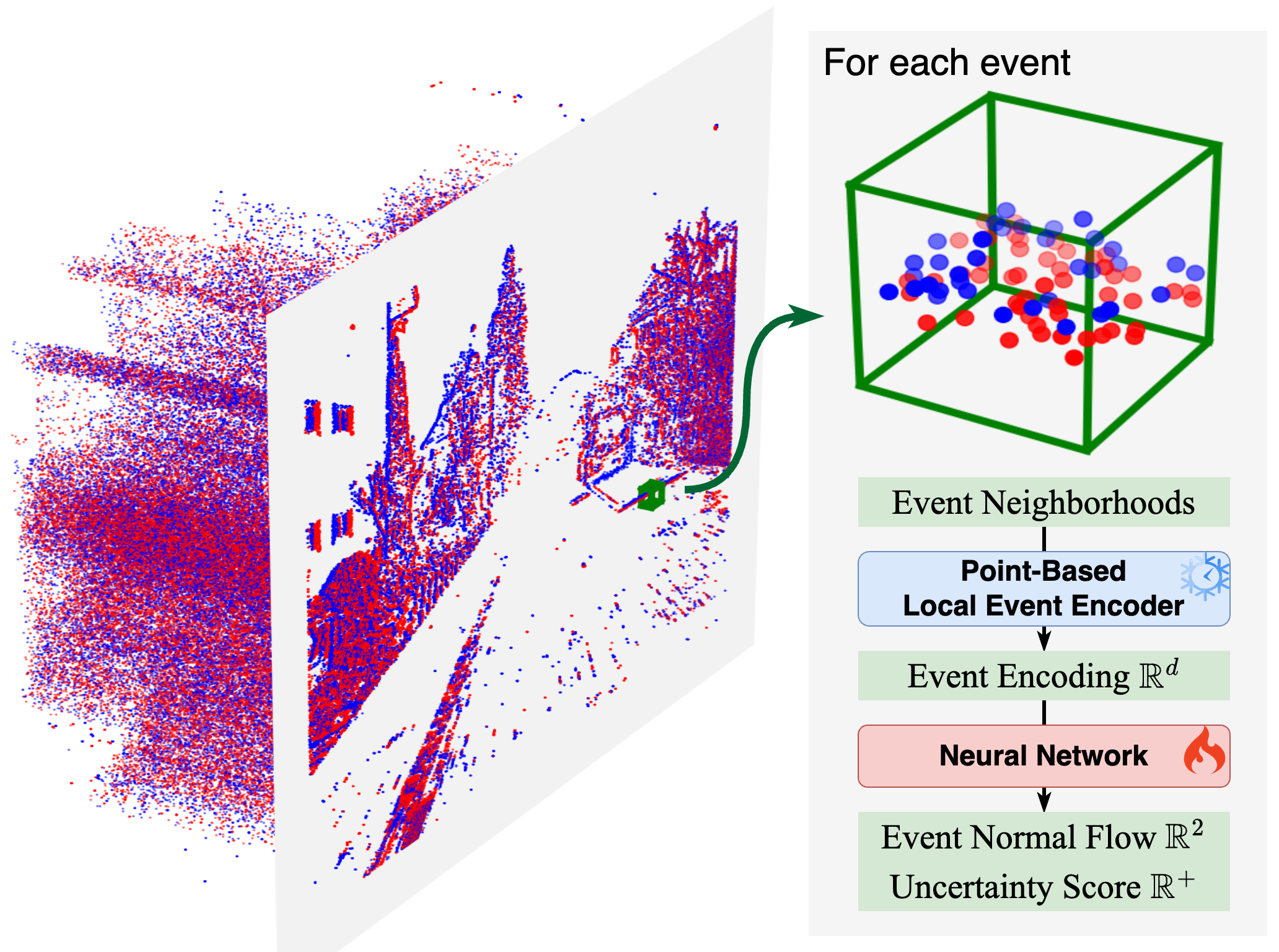
- Dehao Yuan, Levi Burner,
Jiayi Wu, Minghui Liu, Jingxi Chen, Yiannis Aloimonos, Cornelia Fermüller. Learning Normal Flow Directly From Event Neighborhoods. ICCV 2025
[Arxiv] [Code] [Video demo]

Wu, Jiayi*, Xiong, Tianyi*, Botao He, Cornelia Fermuller, Yiannis Aloimonos, Heng Huang, and Christopher Metzler. Event3DGS: Event-based 3D Gaussian Splatting for High-speed Robot Egomotion. CoRL 2024
[Project Page] [Paper] [Video demo]
Wu, Jiayi, Yu, Boxiao, Islam, Md Jahidul. 3D Reconstruction of Underwater Scenes using Nonlinear Domain Projection. IEEE CAI 2023 (Best Paper Award)
[IEEE Xplore] [Poster] [Video demo]
- Yu, Boxiao,
Wu, Jiayi, Islam, Md Jahidul. UDepth: Fast Monocular Depth Estimation for Visually-guided Underwater Robots. ICRA 2023
[Project Page] [IEEE Xplore] [Video demo] [Code]
- A. Kaleo Roberts, Kamal Sarabandi, Jasmeet Judge, Alejandro Monsivais-Huertero,
Jiayi Wu. VALIDATION OF A FULL-WAVE BACKSCATTER MODEL FOR CORN FIELDS USING MEASUREMENTS FROM A GROUND-BASED SCATTEROMETER. IGARSS 2023
Journals and Thesis
- Md Abu Bakr Siddique,
Jiayi Wu, Ioannis Rekleitis, and Md Jahidul Islam. AquaFuse: Waterbody Fusion for Physics Guided View Synthesis of Underwater Scenes. RA-L
[Project Page] [Arxiv] [Video demo]
-
Wu, Jiayi. Low-Cost Depth Estimation and 3D Reconstruction in Scattering Medium. Master’s Thesis. 2023
[UFDC] -
A. K. Roberts,
J. Wu, A. Monsivais-Huertero, J. Judge, R. C. Moore and K. Sarabandi, Microwave Backscatter Phenomenology of Corn Fields at L-Band Using a Full-Wave Electromagnetic Solver, IEEE Transactions on Geoscience and Remote Sensing, vol. 62, pp. 1-11, 2024, Art no. 2000511, doi: 10.1109/TGRS.2023.3340198.
[IEEE Xplore] -
Kaiser Niknam, Jasmeet Judge, A. Kaleo Roberts, Alejandro Monsivais-Huertero, Robert Moore, Kamal Sarabandi,
Jiayi Wu, A 3-D Full-Wave Model to Study the Impact of Soybean Components and Structure on L-Band Backscatter, IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, doi: 10.1109/JSTARS.2024.3426366.
[IEEE Xplore]
📖 Patents
-
[CN212400777U] Stilt type deformation wheel
-
[CN113511087A] Unmanned automobile automatic charging system and charging docking method
📃 Projects

UDepth
- A monocular underwater depth estimation pipeline, using RMI as the input space, constructs a lightweight domain projection module, a lightweight CNN feature extraction module, and a lightweight Transformer-based depth estimation network. And the depth estimation network is supervised with knowledge of underwater light attenuation as a prior. The results show that our depth estimation accuracy is close to the SOTA model, and much faster than them.
This is a collaborative project on underwater depth estimation with Boxiao Yu, a Ph.D. student in RoboPI lab.
[IEEE Xplore] [arXiv] [Code] [pre-print]
SDU-SfM
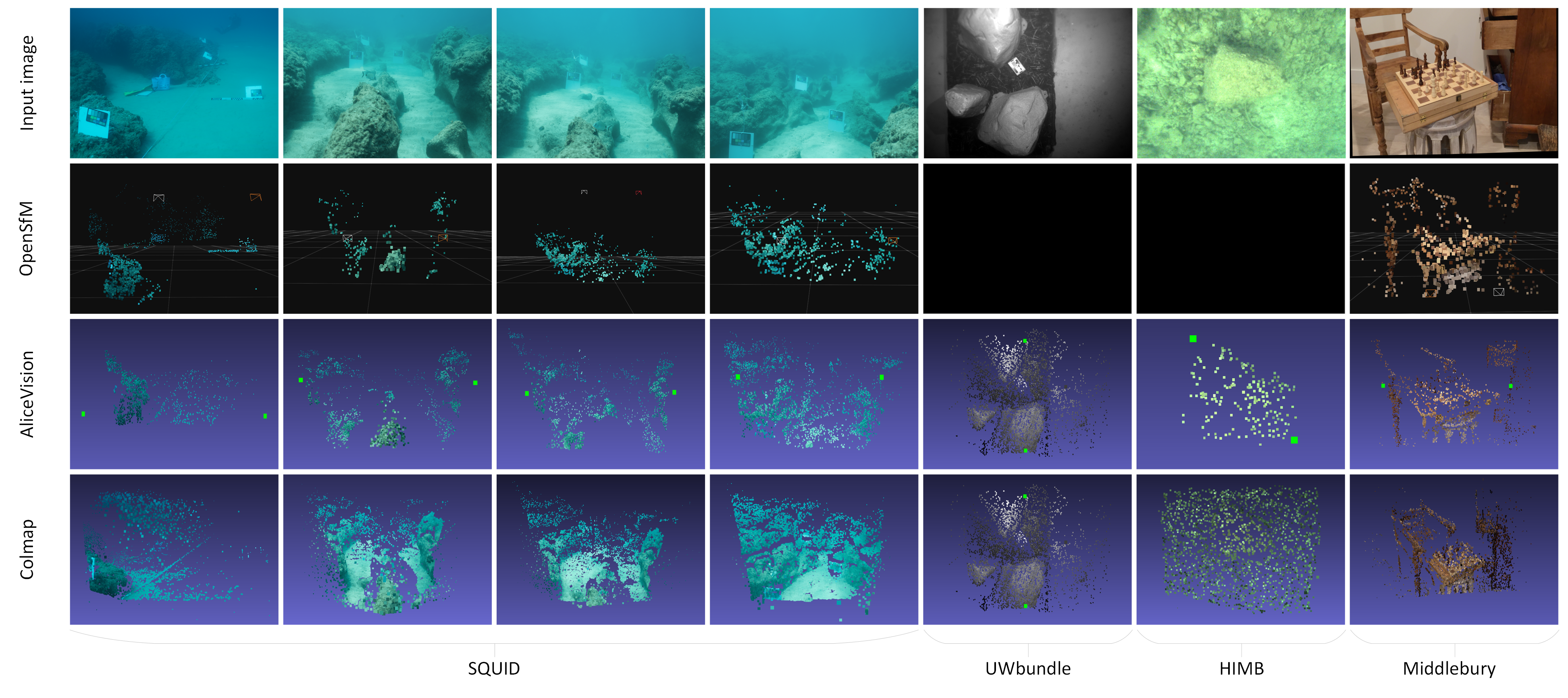
- A fast depth-guided semi-dense underwater 3D reconstruction pipeline without a deep learning model. Underwater image restoration is implemented through RMI channel and underwater imaging model to improve the number of feature matches. Reduce the computational complexity of feature extraction by using the depth map as a mask. In order to achieve higher quality(semi-dense) underwater 3D reconstruction, the depth maps are used as the supervision to refine the 3D point cloud and remove noise.
This project is my master’s thesis, we have submitted a journal to the IEEE Transactions on Artificial Intelligence (TAI). Here is the video demo.
Learning-based Infringing Video Retrieval
- An learning-based infringing video retrieval system based on the fusion of global features and local features. I did a summer internship in the Vobile’s R&D department under the supervision of Dr. Zhao, CTO of Vobile. I built a learning-based infringing video retrieval system based on the fusion of global features and local features. I used Vobile’s video database to train the model, and achieved good performance. Before I ended my internship, I put it together into a python package and organize each component in the system into an easy-to-use python toolkit. I also wrote the manual of the package and a document about future optimization steps to finally handed over to the person who took over the project.
🏭 Job Experience
-
Research Assistant ——— May. 2024- Present
University of Maryland, College Park, MD, United States. -
Teaching Assistant ——— Aug. 2023- May. 2024
University of Maryland, College Park, MD, United States. -
Digital Audio and Video Algorithm Engineer ——— May. 2022- Aug. 2022
Vobile, Santa Clara, CA, United States. -
Graduate Student Assistant ——— Jan. 2022- Jan. 2023
Remote Sensing Laboratory at University of Florida, Gainesville, FL, United States.
🏅 Honors and Awards
SCHOLARSHIPS
- 2024 UMIACS Fellowship
- 2022/2021 UF Herbert Wertheim College of Engineering Engineering Achieve Award
- 2019 First Class School Financial Aid for Overseas Exchange Program
COMPETITIONS
- 2021.06 Individual
1st Prizein the National University Graduate Design Competition (Only two people won this award nationwide) - 2019.10 Provincial
1st Prizeof National 3D Digital Innovative Design Competition - 2019.09
2nd Prizeof National 3dds Competition Classic - 2019.06
3rd Prizeof The 16th Zhejiang Province Mechanical Design Competition for College Student - 2019.04
3rd Prizeof The Challenge Cup Extracurricular Academic Works Competition
💬 Academic Services
Reviewer
- 2024 International Conference on Learning Representations (ICLR)
- 2024 Conference on Neural Information Processing Systems (NeurIPS)
- 2023/2024 IEEE International Conference on Robotics and Automation (ICRA)
- 2023/2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
- IEEE Transactions on Pattern Analysis and Machine Intelligence (TPAMI)
- IEEE Robotics and Automation Letters (RAL)
- IEEE Journal of Oceanic Engineering (JOE)