I am Jiayi Wu, a 3rd-year Ph.D. student supervised by Prof. Yiannis Aloimonos at the Perception & Robotics Group, University of Maryland, College Park.
My research focuses on 3D vision and robotics, especially 3D/4D generation, active vision, and field robotics with an emphasis on underwater robotics. Inspired by nature, I aim to build world generators, simulators, and robot perception systems that challenge existing paradigms and redefine the future of 3D vision and robotics.
Before joining UMD, I worked with Prof. Md Jahidul Islam and completed my Master's thesis under his supervision.
Research Interests
-
World Reconstruction and Generation
3D/4D reconstruction, view synthesis, and world models for simulation and embodied AI.
-
Robust and Active Vision
Reliable perception in harsh conditions and closed-loop vision for deliberate sensing.
-
Physics-informed generative model
Generative modeling constrained by physical structure for plausible dynamics and simulation.
News
-
Single-Step Latent Diffusion for Underwater Image Restoration accepted by TPAMI
2025/07/02The paper will be presented at ICCP 2025.
-
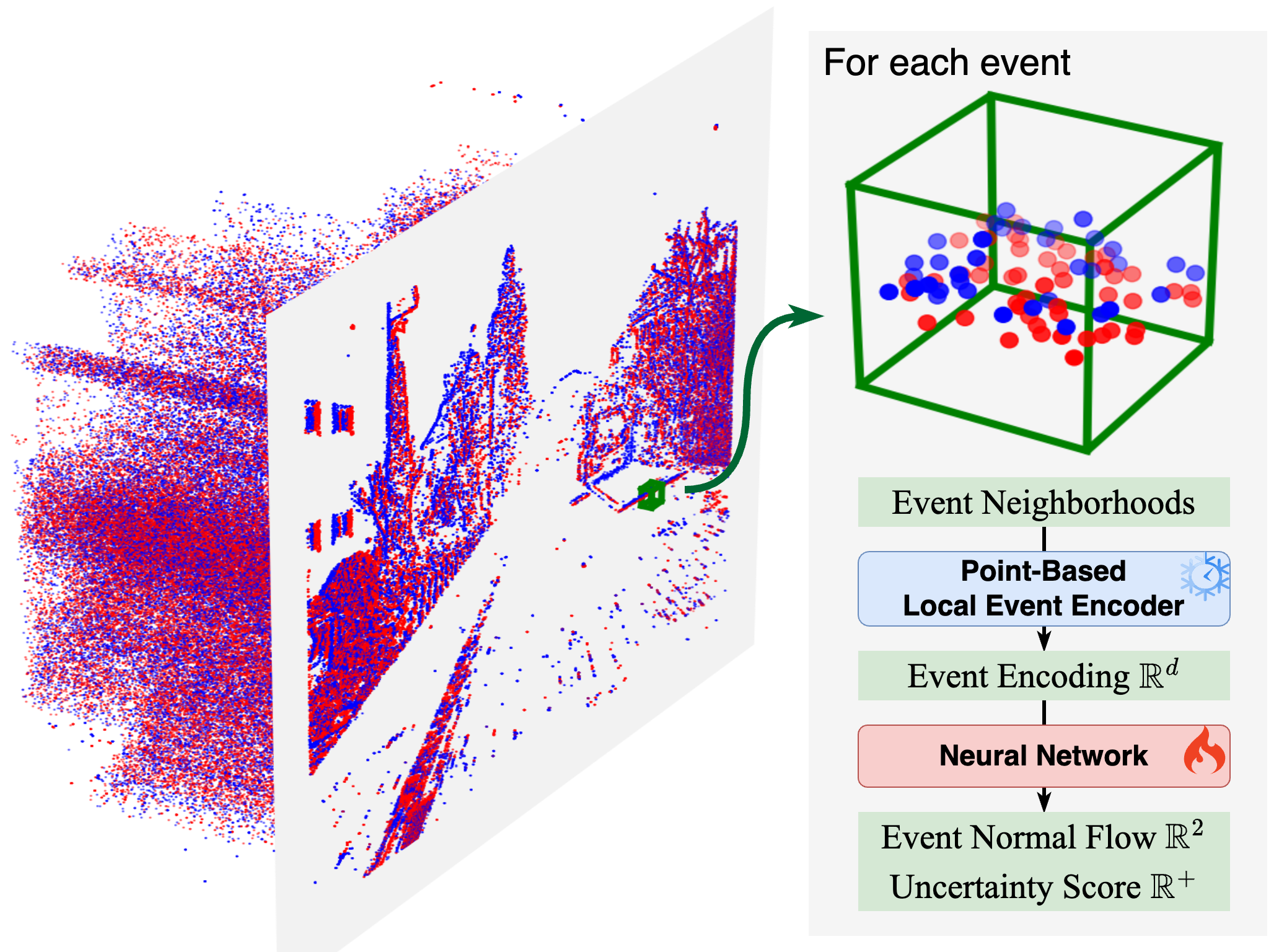
Learning Normal Flow Directly From Event Neighborhoods accepted by ICCV 2025
2025/06/25Work on event-based normal flow estimation with collaborators at UMD.
-
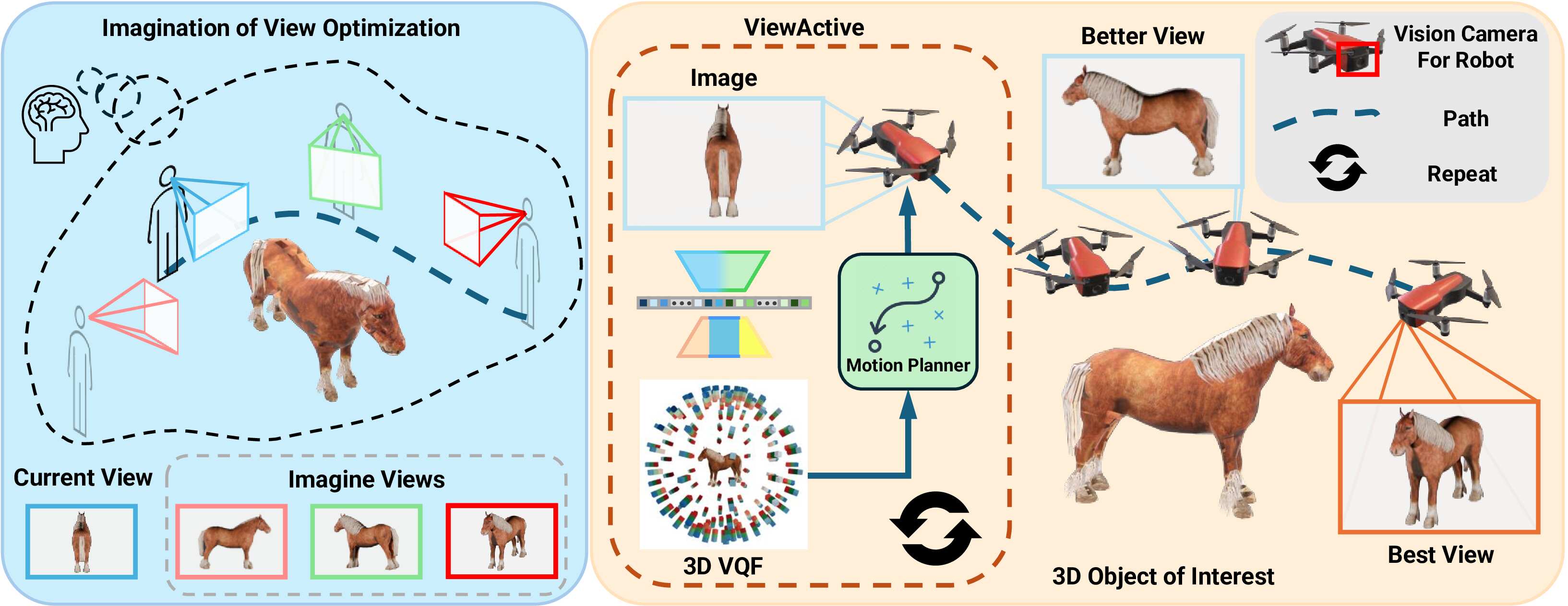
ViewActive accepted by IROS 2025
2025/06/15Active viewpoint optimization from a single image.
-
Event3DGS accepted by CoRL 2024
2024/09/04Event-based 3D Gaussian Splatting for high-speed robot egomotion.
-
MARVIS accepted by IROS 2024
2024/06/30Motion and geometry aware real and virtual image segmentation.